
王建宇,舒嵘,黄庚华,薛永祺.激光成像雷达技术和系统研制[J].中国科学院院刊,2013,(z1):67-76.
激光成像雷达技术和系统研制
Laser Imaging Detection and Ranging Technologies and Systems Development
激光成像雷达技术和系统研制
Laser Imaging Detection and Ranging Technologies and Systems Development
作者
王建宇
中国科学院上海技术物理研究所 空间主动光电技术实验室上海 200083
Wang Jianyu
Laboratory of Space Active Optoelectronic Technology, Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai 200083, China
舒嵘
中国科学院上海技术物理研究所 空间主动光电技术实验室上海 200083
Shu Rong
Laboratory of Space Active Optoelectronic Technology, Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai 200083, China
黄庚华
中国科学院上海技术物理研究所 空间主动光电技术实验室上海 200083
Huang Genghua
Laboratory of Space Active Optoelectronic Technology, Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai 200083, China
薛永祺
中国科学院上海技术物理研究所 空间主动光电技术实验室上海 200083
Xue Yongqi
Laboratory of Space Active Optoelectronic Technology, Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai 200083, China
中国科学院上海技术物理研究所 空间主动光电技术实验室上海 200083
Wang Jianyu
Laboratory of Space Active Optoelectronic Technology, Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai 200083, China
舒嵘
中国科学院上海技术物理研究所 空间主动光电技术实验室上海 200083
Shu Rong
Laboratory of Space Active Optoelectronic Technology, Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai 200083, China
黄庚华
中国科学院上海技术物理研究所 空间主动光电技术实验室上海 200083
Huang Genghua
Laboratory of Space Active Optoelectronic Technology, Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai 200083, China
薛永祺
中国科学院上海技术物理研究所 空间主动光电技术实验室上海 200083
Xue Yongqi
Laboratory of Space Active Optoelectronic Technology, Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai 200083, China
中文关键词
星载激光雷达,机载激光雷达,三维成像,激光测距
英文关键词
Spaceborne lidar, airborne lidar, three-dimensional imaging, laser ranging
中文摘要
文章简述了激光成像雷达的原理和应用需求, 介绍了国外典型机载和星载激光成像雷达系统,分析了激光成像雷达的主要技术指标,结合不同体制激光成像雷达的分析,介绍了由上海技术物理研究所研发的各类激光成像雷达和部分应用结果。
英文摘要
Laser Imaging Detection and Ranging (LIDAR) is an active detection technology used for precise and fast 3-D spatial information acquisition for ground objects. Just like the Imaging Spectrometer technology and the Synthetic Aperture Radar (SAR) technology, LIDAR becomes one of the core acquisition technologies in ground earth observation. LIDAR not only can be used to map global high-precision Digital Elevation Model (DEM), along with high-resolution multispectral and hyper-spectral remote sensing images, but also can be used to generate 3-D images for a variety of purposes. Nowadays, air-borne LIDAR has already been being used for commercial purposes globally. On the other side, NASA has developed a series of space-borne laser imaging radar used not only for monitoring earth object such as atmosphere, glaciers, oceans, topography, and vegetation, but also for topographic survey of other planets. LIDAR Surface Topography (LIST), which will be completed in 2020, can achieve topographic survey with resolution of 5 m. Based on the principle of laser pulses distance measurement and the equation related to LIDAR, this paper discusses key technical specifications such as detection distance, accuracy, stability, false alarm rate, imaging view angle, resolution, and so on. This paper introduces 5 different kinds of laser imaging radars developed by the Shanghai Institute of Technical Physics as follows: (1)Chang E One lunar exploration satellite laser altimeter is a typical single-beam laser radar. It works on the 200 km circular lunar orbit and produces complete 3-D topographic map of lunar surface by obtaining distance data. (2)Multi-beam pushbroom LIDAR exploration is a system that can generate high-resolution 3-D terrain data and high-resolution 3-D visible light composite image. This is done by simultaneously emitting 24 laser beams, receiving echo signal using the 24-elements Silicon APD detector and combining with data obtained by visible CCD. (3)Airborne scanning laser ranging/imaging scanner is developed in the 1990s. This laser imaging radar system can obtain ground object’s position information and infrared gray-scale thermal image by combining Laser Lattice imaging technology and infrared scanning imaging technology. (4)Airborne high-frequency 3-D scanning laser radar can obtain high-resolution 3-D data and echo images. It uses laser with frequency up to 100 kHz, swing motor with large scan angle, swing lens with large diameter and coaxial laser transceiver system. (5)Photon counting laser radar detection system, along with its working mechanism and features are also introduced. Latest progress of photon counting laser radar made by the Shanghai Institute of Technical Physics is also included in this paper.
DOI10.3969/j.issn.1000-3045.2013.Z01.008
激光成像雷达是一种用于精确、快速获取地面及地面目标三维空间信息的主动式探测技术,与成像光谱技术、合成孔径雷达(SAR)技术一起被列为对地观测系统最核心的信息获取技术。激光成像雷达为全天时传感器,受地面背景辐射、天空背景辐射、阴影和太阳高度角干扰小,并具有较高的定位精度和灵敏度,这些特点使它能满足多种遥感和测绘任务的需求[1]。
激光成像雷达不仅可用于全球高精度数字地形模型(DEM)的测绘,还可以直接获取高精度三维地形模型和辐射强度影像相结合的数据,并对树木和森林等目标具备一定的穿透作用。激光成像雷达的三维信息和多光谱、超光谱等二维光学影像结合,可大大提高目标识别的效率和准确性。
目前,机载激光成像雷达已广泛地应用,星载激光成像雷达也以试验为主转入业务应用。本文将通过分析激光成像雷达的主要技术指标和成像体制,介绍几类由中科院上海技术物理所研发的用于遥感的激光成像雷达系统。
2 国外激光成像雷达发展概况
国际上激光成像雷达的发展始于20世纪80年代,目前机载激光成像雷达已实现了商业应用,加拿大Optech公司生产的ATLM、瑞士Leica公司的ALSSO、瑞典TopoEyeAB公司的TopEye、德国IGI公司的LiteMapper、法国TopoSys公司的FalconⅡ等是当前较成熟的商业系统[2]。
在星载激光成像雷达的研制方面,美国航空航天局(NASA)是国际引领者,NASA研制了一系列星载激光雷达用于地球大气、冰川、海洋、地形、植被勘测和外星球地形测量,典型星载激光成像雷达系统的指标如表1所示,反映了国际上星载激光成像雷达的发展趋势。
1994年1月,由美国国防部(the United States Department of Defense)和NASA 联合研制的月球探测器Clementine发射升空。搭载的激光测距仪[3]测量的数据用于制作月球表面高程图,并结合重力信息研究月球外壳密度分布等。激光测距仪轨道高度为640km, 覆盖月球两极60°之间的范围,测量脉冲重复频率为1Hz。
火星全球勘探者号MGS 宇宙飞船由美国NASAGoddard 空间飞行中心组织研发,于1996年11月发射升空,星载激光雷达系统MOLA - 2 [4,5] 是其搭载的4大仪器之一。MOLA 探测的主要目的是确定火星球体的地貌,并研究火星表面反射率特征、矿物学分布以及反射率的季节变化,并为将来火星探测者的着陆地点选择提供测地学和地形学上的评估。
世界上首颗激光测高试验卫星ICESat 于2003年1月在美国成功发射,星上装载了第一个用于连续全球观测的激光测高仪GLAS[6,7]。ICESat轨道高度约600km,可覆盖地表86°N—86°S即两极的大部分区域。其科学目标主要是:研究冰盖变化与极地气候间的响应,评估极地冰雪变化对全球海平面的影响;测量全球范围内的云层高度和云/气溶胶垂直结构,研究全球温度平衡;绘制陆地拓扑图,测量陆地表面粗糙度和反射率、植被冠盖以及冰、雪盖面的表面特征。
激光雷达地形测量系统(LIST)[8,9]是美国“对地观测十年计划”确立的15个推荐任务之一,主要目的是在数年内实现对全球地形5m空间分辨率的测绘。LIST计划研制周期2016—2020年,低轨道单载荷系统,5m水平分辨率,0.1m高程精度,至少5km条带幅宽,完成对全球陆地、冰层和冰河,植被垂直结构等分米级绝对高程精度的地形测绘。
3 激光成像雷达的基本原理和技术指标
最常用的激光成像雷达测距方法是脉冲测距,激光器向目标发射一束脉冲激光,接收系统通过测量激光对目标表面的散射回波获得光脉冲飞行时间<d:¥两边机器共享¥2013增刊1¥王健宇-7752¥image1.pdf>,计算得到距离值<d:¥两边机器共享¥2013增刊1¥王健宇-7752¥image2.pdf>。其中<d:¥两边机器共享¥2013增刊1¥王健宇-7752¥image3.pdf>为真空中的光速。激光雷达接收到的漫反射回波信号功率Pr由功率测距方程(1)[10]给出:

式中,Pt为激光发射功率,Sr为有效接收口径面积,Tr为接收系统光学透过率,ρ为目标反射率,τa为大气单程传输透过率,θ为激光束与地面之间的夹角,R为激光成像雷达与地面距离。测距方程是激光雷达设计和确定主要技术指标的基础,反映激光成像雷达性能的主要技术指标有:
探测距离:把目标认为是朗伯体大目标,激光雷达的最大测程Rmax[11]可由式(2)表示。


式中,τo为光学系统效率,Ar为系统接收孔径,Prmin为系统最小探测功率。测量出系统最小探测功率,就可以对激光高度计的最大测程进行标定,由于在地面无法对系统进行几十乃至上百公里的测程直接标定,一般采用外场消光比模拟测试和目标回波模拟器进的办法确定仪器的最大测程[12]。
测距精度:目标高层的测量精度和激光雷达的测距精度直接相关,测距精度和系统的时间测量精度、激光回波的形状(目标特性相关)和采用的测量方法有关。目前有多种基于回波形状的时间测量估算方法[13],如固定比例辨别法、脉冲质心点法、恒比定时法、脉冲中间点法等,可提高测量精度。
测距不确定度[14]:综合反映了测距分辨率δ1、测距重复度δ2和测距系统延迟常数测量误差δ3,代表了激光雷达测到的目标距离与标定的目标距离的相对误差。测距不确定度δ如式(3)所示。

虚警率[15]:即系统噪声电压超过鉴别门限的概率,此时激光雷达误触发,引入虚假距离数据。激光雷达的应用中,目标的背景辐射往往多变,需要接收系统能够根据背景迅速自动调整,保证虚警率的恒定,从而减少虚假距离数据。
 图1 CE-1 卫星激光高度计和设计框图
图1 CE-1 卫星激光高度计和设计框图
成像视场和成像分辨率:激光成像雷达的视场决定系统成像宽度,而成像分辨率是由相邻的激光测点的距离决定。在激光器重频固定的情况下,成像视场和成像激光点云密度成反比,要提高视场宽度,就要牺牲成像的分辨率。
激光脉冲的能量、频率和脉宽:激光脉冲的能量高,系统的作用距离远,而高脉冲频率,可增加成像的视场或提高成像分辨率,窄的脉冲宽度有利于系统灵敏度和测量精度的提高。
4 固定激光束测距激光成像雷达
固定激光束测距激光成像雷达可由单束激光完成激光的测距或多束激光和多元探测器完成多点的测距,由飞行器(如卫星)沿轨道对地球持续的绕飞完成成像。这类激光成像雷达没有运动的扫描部件,设计相对简单,激光器的能量和接受光学系统的口径可设计得很大,适用于远距离的三维激光成像,星载激光雷达系统多采用这种成像体制。
4.1 “嫦娥一号”探月激光高度计
“嫦娥一号”(CE-1)探月卫星激光高度计[14](图1)由中科院上海技术物理所、中科院上海光学精密机械所联合研制,是典型的单激光束激光雷达,工作于200km绕月圆形轨道上,通过对卫星绕月获得的卫星与月面的距离数据、卫星轨道参数和地月坐标等关系进行计算,制作全月面栅格状的地形图。主要技术指标见表2。
激光高度计采用高精度激光并行收发技术,激光通过扩束准直,旁轴发射。发散角小于0.6mrad,月面激光足印小于120m。系统采用了口径为120mm的望远镜和雪崩硅二极管探测器实现激光回波微弱信号的高灵敏度接收,155MHz时间间隔频率计数确保测距的分辨率、恒虚警自适应增益控制,减少系统的虚警率。
系统采用紧凑型激光二极管泵浦、电光调Q 的固体Nd∶YAG 激光器和高真空条件下密封防污染技术,实现了发射频率为1Hz的150 mJ大功率、长寿命半导体泵浦固体激光器的空间应用。
激光高度计的测距分辨率δ1<1m、测距重复度
δ2优于0.7m,测距系统延迟常数测量误差δ3<1m,激光高度计的总测距不确定度δ为4.8m。系统的最小探测灵敏度为6×10-8W。在假设月面反射率为0.03时,系统的最大测程为225.5km。
2007年10月24日,激光高度计随CE-1卫星发射,2007年11月28日激光高度计首次开机,共获取了900多万个卫星到月面的距离数据,图2是对激光高度计获取的距离数据进行处理后得到的月球三维地形图。

图2 CE-1激光高度计获取的极区DEM图
4.2 多元推扫式激光雷达
2010年,中科院上海技术物理所研制了多元推帚式激光成像雷达,该系统由24束激光同时发射,24元硅APD探测器同时接收回波信号,并能与可见光线阵探测器复合工作,同时获得一定幅宽的高精度三维地形数据和高分辨率可见光数据,快速获得具有精确空间匹配信息的复合立体影像。
系统的主要组成如图3所示,主要技术指标见表3。推帚式激光多元测量单元与可见光线阵CCD探测器共用接收望远镜,通过分色片将激光波段与可见光波段信号分离,由相应的传感器接收。单束激光光束经衍射光栅分束为多路激光束后发射,并由逐一对应的多元探测器并行接收。后端并行时间间隔测量电路测量激光往返时间,获得各个激光地面采样点相对距离。同时,通过同步控制单元触发CCD传感器,同步获取激光地面的高分辨率平面影像。各传感源数据根据机载GPS时间标签实现与姿态、位置数据的反演。系统所获得的地面采样点如图4所示。
#$TAB 2010年12月该系统开展了飞行演示验证试验,获得了激光点云数据、CCD图像以及快速融合高精度三维影像。试验结果满足相应指标要求,在三维影像上(图5),人工设施如建筑物、桥梁等清晰可辨,山地地貌高程起伏特征明显,达到了预期的飞行试验验证目的。
5 激光束扫描激光成像雷达
用于遥感的激光束扫描激光成像雷达一般通过机械扫描镜完成成像的一维扫描,通过平台(如飞机)的运动获得第二维信息,激光束通过扫描镜发射到目标上,单元探测器通过接受激光的回波信号,获得距离或高度信息。也可以采用多束激光,以提高激光成像的点云密度,提高分辨率。根据回波信号的强度,还可以重建地物的灰度图像。机载激光成像雷达多采用这种成像体制。
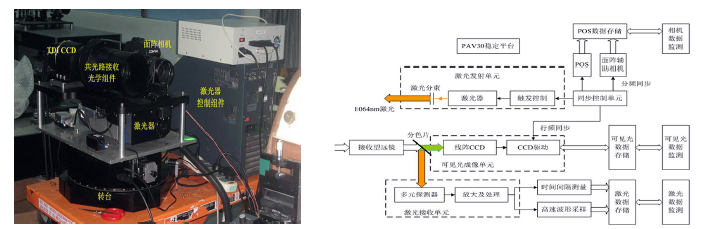
图3 多元推帚式激光成像雷达系统和原理框图
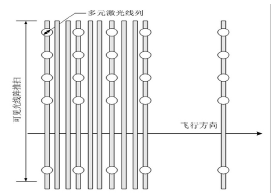
图4 地面采样点分布示意图


图5(a) 三维成像高层图图 5(b)三维高层和地面影像融合图
5.1 机载激光测距——成像组合扫描仪
机载扫描激光测距——成像组合扫描仪(图6)是20世纪90年代由中科院上海技术物理所联合中科院遥感应用所等单位研制的具有激光点阵成像和热红外扫描成像相结合的激光雷达系统。结合飞机平台的姿势测量和GPS定位,可获取地面景物的三维位置和热红外影像灰度信息。该系统设计的创新之处是在传统的热红外扫描仪基础上,巧妙地增加了三维的激光发射和激光回波接受系统。通过GPS/INS部件的姿态测量和时间同步,系统的多种数据经地面计算机处理,可以快速生成数字地面高程模型(DEM)地学编码图像。系统的主要技术指标见表4。图7是由该系统飞行并生成的澳门热红外背景三维地形图。
5.2 高重复率扫描三维激光雷达
2007年,上海技术物理所自主研发了机载高重复率扫描三维激光雷达[16]。仪器采用最高重复频率可达100khz的激光器、大扫描角度的摆角电机和大口径的摆镜、同轴的激光发射和接受系统。图8是机载高重复率扫描三维激光雷达照片和光路结构图,表5给出了该系统的主要技术指标。

图6 机载激光测距——成像组合扫描仪

图7 澳门地区热红外背景三维图
6 光子计数激光成像雷达
光子计数探测体制激光雷达也采用了直接脉冲探测的方法,通过测量发射激光脉冲和回波光子信号的时间来获取目标距离。光子探测技术利用盖格型探测器对单光子量级信号的高灵敏度响应,将线性探测体制下的数千光子能量探测转化为对少光子、甚至单光子的计数探测,并通过光子的多次累积提高探测概率,最大限度提高系统探测灵敏度,从而降低系统对激光器的要求。光子计数激光雷达的基本探测原理[17]如图9所示。

上海技术物理所2006年起开始光子计数激光雷达的研究工作,2011年研制了原理样机[18-21]。其工作原理如图10所示。激光器发射的532nm脉冲激光经过光学系统分束后照射在目标上,目标表面返回的回波光子由望远镜接收并最终聚焦到探测器的每个象元上。探测器能够对回波中的单个光子信号进行响应并最终输出电信号,经过数据处理后获得目标的距离信息。




在样机的研制中,主要解决了高灵敏度光子计数探测、光纤耦合焦平面、激光多波束发射、点云数据滤波等关键技术,设计并实现了8元并扫光子计数激光成像雷达原理样机,具体技术指标见表6。样机完成了实验室测试和外场成像试验(图11)。测试和成像结果表明,就是在午后强烈的日照背景下也能获取目标的三维信息,验证了光子计数技术在强烈日光背景下用于对地遥感观测的可行性。系统测距精度达到6.3cm,距离分辨率小于10cm,能够实现高分辨率高精度的目标三维成像。
7 结语
近年来,国内激光成像雷达的研究获得长足进步,为我国激光成像雷达的发展奠定了坚实的基础。以下对未来的发展提出几点建议:
(1)国内在激光成像雷达的关键技术研究上近年来有很大的进展,并完成了多个系统的研制,但在高性能的核心部件,如高频率大能量激光器、高灵敏度探测器等还以引进为主,要进一步重视元器件的突破,解决核心部件国产化的问题;
(2)目前国际上机载激光成像雷达已进入商业运行,国外仪器占领国内大部分市场,国内虽然也研制了类似的设备,但在产品化和商业化运行方面有较大的差距。因此,在机载激光成像雷达上要抓紧形成产品,尽快投入市场运行;
(3) 星载激光成像雷达国际上正在从实验系统向业务运行系统发展。国内的星载激光成像雷达已在空间成功应用。目前应根据国家应用部门的业务需求,尽快形成业务型星载激光成像雷达的工程研制能力,并尽早建立起我国自己的星载激光成像雷达系统。

