


Sun Bingyu,Male,Ph.D.,professor of Hefei Institute of Intelligent Machines,CAS.His main research areas are agriculture intelligent system and automatic control.He has been in charge of the development of agriculture IOT of Tianjing city and intelligent farm of Longkang.E-mail:bysun@iim.ac.cn
农业是国民经济的基础,现代农业装备是现代农业的重要支撑。近年来,随着设施农业、精准农业和高新技术的发展,特别是土地流转与农业生产规模化、集约化的加剧,以及人工作业成本的不断攀升,农业机器人成为替代繁重体力劳动、改善生产条件、提高收获生产效率、转变发展方式、降低生产成本和损耗、增强综合生产能力的关键装备,也是国际农业装备产业技术竞争焦点之一。
农业机器人是一种以农产品为操作对象、兼有人类部分信息感知和四肢行动功能、可重复编程的柔性自动化或半自动化设备[1]。它能减轻劳动强度,解决劳动力不足,提高劳动生产率和作业质量,防止农药、化肥等对人体的伤害。目前,农业机器人已有了很大发展,机器人可以取代人工进行一定的农业活动,如田间及温室喷洒农药,部分作物收获及分选作业,以及一些人类完成有困难的工作,如高处采摘等。农业机器人的广泛使用,将会极大地改变传统农业的劳作模式,降低对大量劳动力的依赖,为农业实现从传统向现代转变贡献力量。
1 农业机器人的特点与分类 1.1 农业机器人的特点同工业机器人相比,农业机器人具有4个特点[2, 3, 4]。
(1)作业的季节性。由于农业机器人大都针对农业生产某一环节,功能单一,因此农业机器人的使用具有较强的季节性,利用率较低,从而增加了农业机器人的使用成本。
(2)作业环境复杂性。由于农业生产环境多变且无法预知,农业机器人无法同工业机器人一样具有比较固定的作业环境。因此,农业机器人需具有适应不同环境的能力,并且能够在不同环境中智能化完成任务。
(3)作业对象的娇嫩性和复杂性。由于农作物的娇嫩性与复杂性,农业机器人在完成任务时,必须能适应形状复杂、大小迥异的农作物变化情况,并且需进行柔性处理。
(4)使用对象的特殊性。农业机器人的使用对象是农民。一方面,农民并不具备较高的机械电子知识水平,农业机器人必须操作简单、可靠;另一方面,由于农业生产总体利润不高,农业机器人的价格不能超出一般农民的承受能力。
1.2 农业机器人的分类随着近年来国内外对农业机器人研究与开发的重视,目前已研发出多种农业机器人。根据解决问题的侧重点不同,农业机器人大致可以分为两类:一类是行走系列农业机器人,主要用于在大面积农田中进行作业;另一类机械手系列机器,主要用于在温室或植物工场中进行作业。农业机器人的分类具体如表 1[5, 6, 7, 8]。
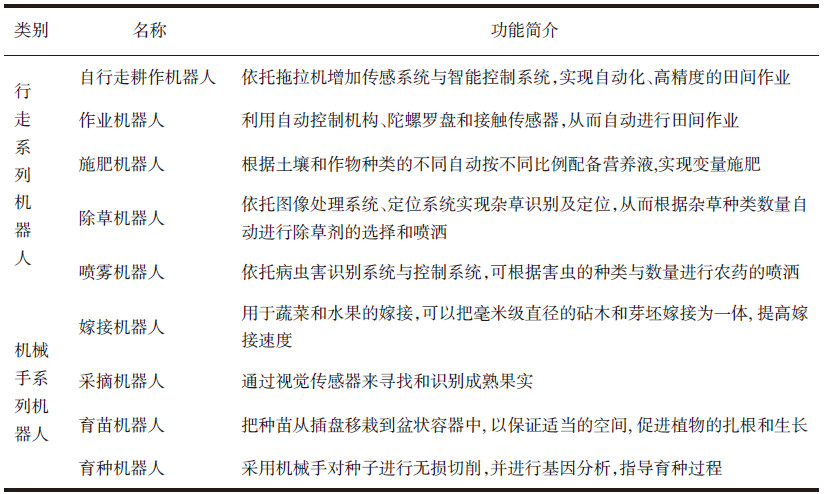
除上述两大类别农业机器人外,还有一些特殊用途的机器人,包括剪羊毛机器人、挤奶机器人、放牧机器人等,也都得到很好的应用[9]。
2 国内外农业机器人的发展状况 2.1 国外农业机器人的发展状况 2.1.1 日本日本是农业机器人研究最早、同时也是市场发育最为成熟的国家之一。目前,日本已研制出育苗机器人、扦插机器人、嫁接机器人、番茄采摘机器人、葡萄采摘机器人、黄瓜采摘机器人、农药喷洒机器人、施肥机器人和移栽机器人等多种农业生产机器人,在理论与应用方面都居世界前列。图 1为日本国家农业和食品研究所发明的能够采摘草莓的机器人。该机器人装有一组摄像头,能够精确捕捉草莓的位置,还有配套软件能根据草莓的红色程度来确保机器人采摘的是成熟的草莓。
 |
| 图 1 日本摘草莓机器人 |
同日本比,由于领土广阔及自身先进的工业技术,美国研究的重点在于行走式农业机器人,在理论与技术上都比较成熟。典型代表是美国新荷兰农业机械公司发明的多用途自动化联合收割机器人,很适合在美国一些专属农垦区的大片规划整齐的农田里收割庄稼。另外比较典型的还有斯坦福一个公司开发的智能生菜生产机器人(图 2),可以实现生菜的精耕细作、施肥除草等。
 |
| 图 2 生菜生产机器人 |
其他国家农业机器人研究与应用方面比较有代表性的有:澳大利亚发明的牧羊犬机器人(图 3),它能在农场上代替传统的放牧劳力;德国农业专家采用计算机、全球定位系统(GPS)和灵巧的多用途拖拉机综合技术,研制出可准确施用除草剂的除草机器人(图 4);法国发明的专门服务于葡萄园的机器人(图 5),几乎能代替种植园工人的所有工作,包括修剪藤蔓、剪除嫩芽、监控土壤和藤蔓的健康状况等;西班牙发明的采摘柑橘机器人,能够依托机器视觉技术从桔子的颜色、大小判断出是否成熟并控制机械手进行采摘;英国西尔索研究所开发的采蘑菇机器人可以确定哪些蘑菇可以采摘以及属于哪种等级,然后测出其高度以便进行采摘;法国研制的分拣机器人能在潮湿肮脏的环境里工作,把大个番茄和小粒樱桃加以区别,然后进行分装。
 |
| 图 3 牧羊犬机器人 |
 |
| 图 4 除草机器人 |
 |
| 图 5 葡萄园机器人 |
与国外相比,我国农业机器人研究与开发方面尚处于起步阶段。目前我们已开发出的农业机器人有:耕耘机器人、除草机器人、施肥机器人、喷药机器人、蔬菜嫁接机器人、收割机器人、采摘机器人等。中国农业大学研制的摘黄瓜机器人利用多传感器融合技术,对采摘对象的成熟度进行判别,并确定收货目标,引导机械手来抓取黄瓜,再用刀片切割瓜藤(图 6);嫁接机器人实现了营养钵苗的供苗、切苗、嫁接和排苗的自动化作业,可广泛用于黄瓜、西瓜、甜瓜等菜苗的嫁接(图 7);北京农林科学院研发的草莓采摘机器人可以自主搜索、识别和采摘成熟草莓果实,不仅可为草莓采摘降低人工成本,还可减轻工作强度(图 8);东北林业大学研制出林木球果采集机器人,可以在较短的林木球果成熟期大量采摘种子,对森林的生态保护、森林的更新以及森林的可持续发展等方面都具有重要的意义,很好地解决了目前在林区仍主要采用人工上树手持专用工具来采摘林木球果的做法;伐根机器人主要用于收集森林采伐剩余物和培育优质工业用材林。它的应用有望克服我国的森林资源危机,改进我国的森林资源利用。
 |
| 图 6 摘黄瓜机器人 |
 |
| 图 7 蔬菜嫁接机器人 |
 |
| 图 8 中国草莓采摘机器人 |
中国是一个发展中的农业大国,农业问题一直是关系到中国社会经济发展的根本问题,而农业科技是目前我国农业增长最主要的推动力。在以后的农业发展中,广泛应用农业机器人,以技术替代资源,提高资源利用率和农业产出率,从而提高经济效益,将是我国现代农业发展的必然趋势。因此,农业机器人相关研究与开发对我国农业的长远发展有着重要意义。
3 存在的问题及展望虽然农业机器人研究已取得很大进展,但目前农业机器人距实用普及还有很长一段距离。推广与普及的主要瓶颈有两点:一是农业机器人制造成本问题,二是农业机器人智能化程度问题。
3.1 农业机器人制造成本问题目前研制出来的农业机器人大都只针对农业生产某一环节的某一项作业而言,农业生产的特征之一是季节性强,造成了农业机器人的使用效率低,间接地增加了农业机器人的成本。其性价比不能满足市场的需要,成为制约农业机器人商业化和进一步研究应用的瓶颈问题。比如采摘机器人,由于草莓、黄瓜等经济作物生产的季节性,如果采摘机器人只能用于一种农作物的采摘,那么该机器人一年工作的时间有限。由于只有当农业机器人的生产成本低于人工收获成本时,农业机器人才能得到推广,这无疑对农业机器人的成本控制提出了较高的要求。
3.2 农业机器人智能化程度问题同工业机器人或者其他领域机器人相比,农业机器人工作环境多变,以非结构环境为主,工作任务具有极大的挑战性。因此,一般而言,农业机器人对智能化程度的要求要远高于其他领域机器人。现阶段农业工程领域的专家纷纷把研究重心从机械部分转向机器视觉、人工智能方面,力图解决农业机器人的智能问题。从目前的技术水平来看,在自动导航、视觉辨识定位等方面已有成熟的解决方案,但总的来讲,目前智能系统的发展还不够完善,很多任务无法由农业机器人单独完成;另一方面,即使是农业机器人具备了相当的智能,能够完成某种任务,然而由于其制造成本过高,开发难度极大而难以实际应用。
随着农业及机器人技术的发展,现有的农业机器人技术也在不断的完善,从而能够更好地为农业生产服务。在今后的发展中农业机器人应侧重以下两点。
(1)开放式的结构及控制系统。目前对于农业机器人根据实现的功能要求,大都采用专用执行机构及专用的控制系统,构成一个封闭式结构。这样的农业机器人具有特定的功能、适应于特定的环境,无法通过更换执行机构、增加传感器等功能模块进行功能扩充。比如把草莓采摘机器人功能扩充到苹果采摘机器人,在目前封闭式结构下工作量基本等同于重新设计与开发。因此,通过研究与设计开放式的结构及控制系统,农业机器人不仅具有良好的扩展性、通用性,还具有柔性作业的能力,这样无疑可以缩短农业机器人的开发周期,降低生产成本,提高利用率及性价比,从而达到促进推广使用的目的。
(2)农业生产标准化研究与机器人技术研究紧密结合。我国地域辽阔,地理条件千差万别,不同区域农业生产环境变化较大,对开发农业机器人的技术要求不统一,给农业机器人的研发带来巨大挑战。因此,农业生产的标准化可以有效地推动农业机器人的发展与应用。另一方面,农业机器人技术研究不仅包括自动化控制、人工智能、机械制造等多个学科,更应包括农学,这样农学与机器人学科才能相互促进、共同发展,农业机器人在功能上才能更符合农业生产需求。
4 结束语从目前研究现状上看,农业机器人能够代替人的部分劳动,且工作效率非常高。对于环境比较艰苦、重体力劳动、单调重复的工作,如喷洒农药、收割及分选作物等有望由农业机器人系统完成,以解放出大量的人力资源。随着我国国民经济的持续高速发展,农业产业结构调整和农业生产的集约化以及我国工业机器人技术的快速发展,我国农业机器人的发展将出现良好的机遇。在新的农业生产模式和新技术的应用中,农业机器人作为新一代智能化的农业机械必将得到越来越广泛的应用。
| 1 | 毕昆, 赵馨, 侯瑞锋, 等. 机器人技术在农业中的应用方向和发展趋势. 中国农学通报, 2011, 27(04):469-473. |
| Cited By in Cnki (18) | |
| 2 | 赵匀. 农业机器人的研究进展及存在的问题. 农业工程学报, 2003, 19(1):1-4. |
| Cited By in Cnki (167) | |
| 3 | 方建军. 移动式采摘机器人研究现状与进. 农业工程学报, 2004, 20(2):273-275. |
| Cited By in Cnki (115) | |
| 4 | 田素博. 国内外农业机器人的研究进展. 农业机械化与电气化, 2007(2):3-5. |
| Cited By in Cnki (22) | |
| 5 | 李玉林, 崔振德, 张园, 等. 中国农业机器人的应用及发展现状. 热带农业工程, 2014, 38(04):30-33 |
| Cited By in Cnki (20) | |
| 6 | Kondo N, Monta M, Fujiura T.Fruit harvesting robots in Japan. Physical, Chemical, Biochemical and Biological Techniques and Processes, 1995, 18(1-2):181-184. |
| Click to display the text | |
| 7 | 汤修映, 张铁中. 果蔬收获机器人研究综述. 机器人, 2005, 27 (1):90-94. |
| Cited By in Cnki (106) | |
| 8 | Sarig Y. Robotics of fruit harvesting:A state-of-the-art review. Journal of Agricultural Engineering Resources, 1993, 54:265-280. |
| Click to display the text |